|
AS21: Ein Hochleistung-Interpolator für 6-Achsen-Knickarm-Roboter
und 6 Achsen Kartesische-Roboter
======================================================================
AS21
Hardwarebeschreibung:
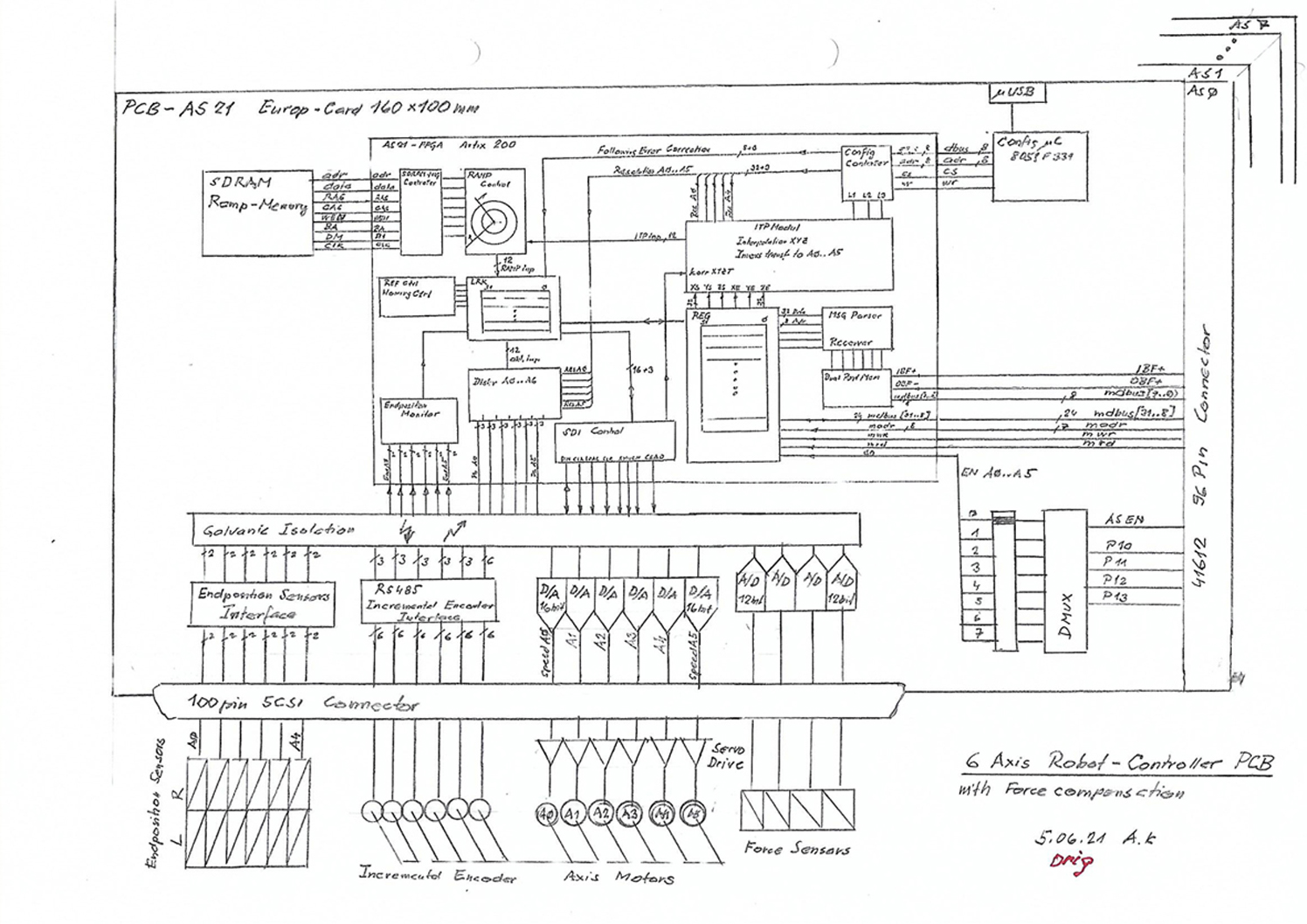
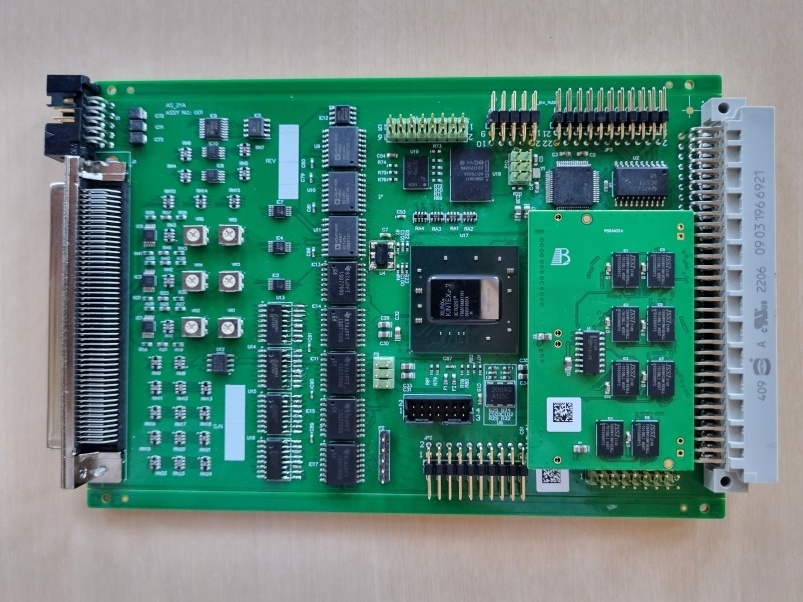
AS21 ist eine Europakarte 160 x 100 mm mit folgenden Aschlüssen:
1.)8 bit Dualport - Ansteuerung
über 16-Byte-Meldungen
2.)
32 Bit Anschluss für ein beliebiger Controller mit 32-bit Schnittstelle.
Direkte Zugriff auf Register des Interpolators und Lagereglers.
Die beide Anschlüsse sind
in einem DIN-61612 Steckverbinder
mit 96-Pin integriert.
Ansteuerung des Interpolators über ein 16-Byte-Message
mit
XYZ-Ziel-Koordinaten (je 32 bit)
Achsen-Istwerte
sowie Statuszustände werden an den überordneter
Controller gesendet.
Interne
Spannungsversorgung 5V,
Interpolationfrequenz
Input (0 bis 0.8 MHz),
Buskontrolleingänge
CS,RD,WR,
Adresse 8-bit,
Handshake-leitungen,
Dual-Port-Bus-Schnittstelle 32-Bit, IBF+,OBF-
3.)
Ein SCSI-100 pol Connector beinhaltet :
Anschluss für 6-Achsenenkoder-A1
bis A6:(A,/A,B,/B,I,/I)
Endlagenanschlüsse
R/L für 6-Achsen, Homing-Ablauf
6-Achsen-16 bit-Analog-Ausgänge, Speed-Sollwerte
mit14 uS Scanfrequenz
4-Analog-12 bit-Eingänge für Kraftsensoren, 100
khz scanfrequenz
4.) Externe Spannungsversorung: +5VEXT,+12VEXT,-12VEXT
galvanisch von
Interne Spannungsversorgung getrennt: 5V
Funktionsbeschreibung
XYZ Befehl:
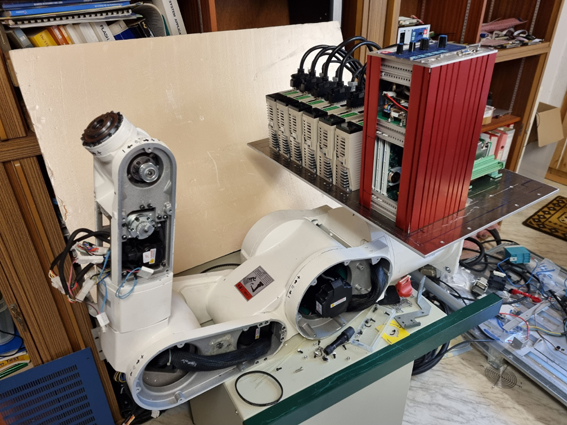
Der Interpolator generiert aus der vorgegebene Linearstrecke XYZ am
Roboterkopf mittels Invers-Transformation Sollkoordinaten für 6 Achsen eines
Knickarmroboters.
Eine nachfolgende XYZ-Strecke kann ohne Unterbruch durchgefahren
werden (NXYZ-Satz)
Ausführungszeit der
Inverstransformation "XYZ to A1..A5" : 0.5 uS
Achsen A5,
A6 führen
Tangentialbewegung zu gefahrene XYZ-Strecke.
Somit für z.Bsp. für Schweiss- oder
Klebevorgänge geeignet.
Die Software ist kundenseitig an beliebiger Roboter anpassbar
Ueber den USB Eingang können Parameter des Roboters
eingegeben werden wie Abmessungen, Achsenauflösungen usw.
Interpolation-Frequenz auf
der XYZ Strecke :max. 0.9 MHz
Variable Rampenlänge, max 4
sek .
Die Kraftsensor-Eingänge
bewirken eine einstellbare Korrektur der
Achsensollwerte-XYZ.
Damit wird die Deformation der Roboterarme durch
Bearbeitungsvorgänge
kompensiert.
Dies ermöglicht auch z.Bsp. Leichtmetall fräsen.
XY Befehl :
Dient zum
testen und optimieren der einzelnen Achsen
Es können aus
3 Achsen-Ebenen E0:A1,A2 / E1:A3,A4 / E2:A5,A6 Bewegungen in der
Achsen programmiert werden
direkt in jeweils
in eine Ebene.
Die AS21-Controller ist
kaskadierbar, d.h. jede Karte kann parallel und unabhängig
ein 6-Achsen Roboter
ansteuern, Synchronisierung über Interpolationsfrequenz Input.
Damit ist auch eine Corobot Ansteuerung möglich
----------------------------------------------------------------------------------------------
Specifications:
AS21: A high-performance interpolator for 6-axis
articulated arm robots
==========================================================================
AS21 hardware description:
AS21 is a Europe card 160 x 100 with the following
endings:
1.) 8 bit dual port - control via 16 byte messages
2.) 32-bit connection for any controller with a 32-bit
interface.
Direct access to registers of the interpolator and position controller.
Both
connections are integrated in a DIN 61612 connector with 96 pins.
Control of the interpolator via a 16 byte message with
XYZ
target coordinates (32 bit each)
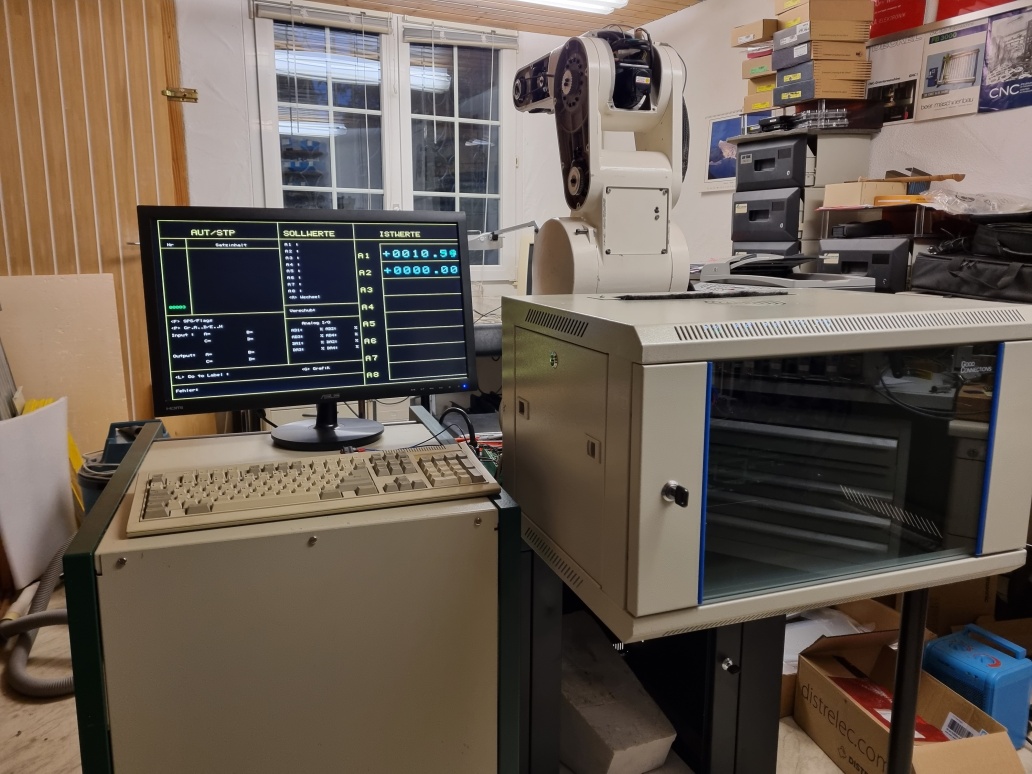
Axis actual
values and status states are sent to the higher-level controller.
Internal
power supply 0..5V,
Interpolation frequency input (0..0.8 MHz),
Bus control
inputs CS, RD, WR, address 8 bit,
Handshake
lines, dual port bus interface 32 bit, IBF +, OBF-
3.) A scsi-100 pin connector includes:
Connection for 6
axis encoders A1 .. A6: (A, A, / A, B, / B, I, / I)
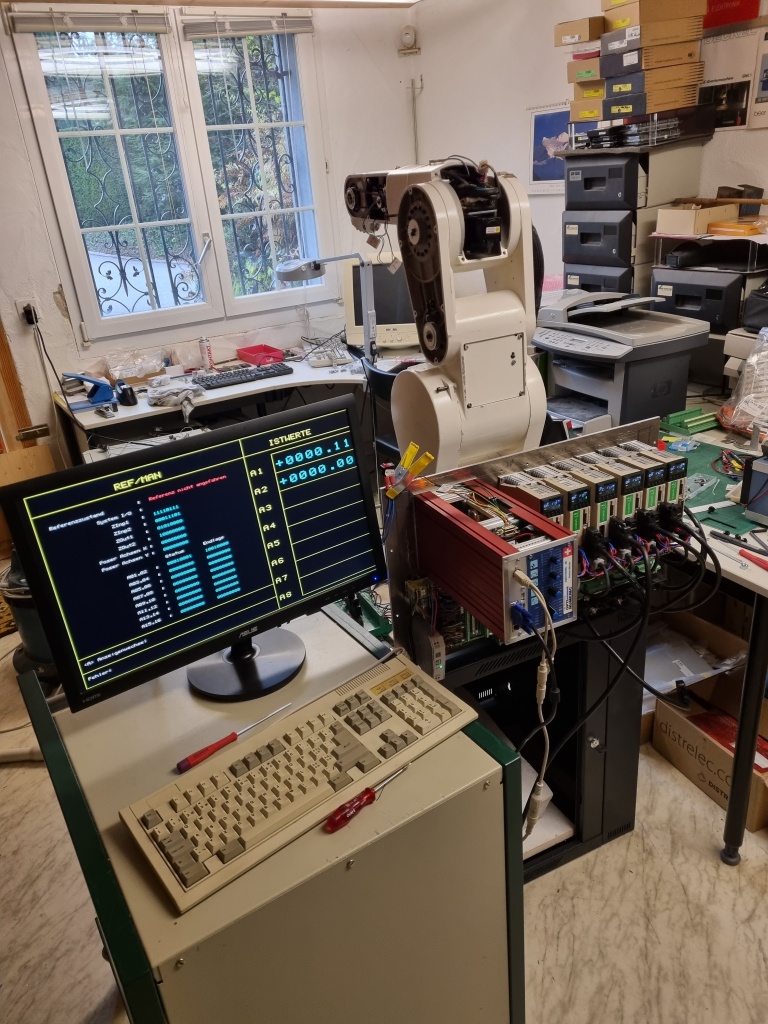
End position
connections R / L for 6 axes, homing process
6-axis 16 bit
analog outputs, speed setpoints, 14 uS scan frequency
4-analog 12 bit
inputs for force sensors, 100 Khz scan frequency
4.) External power supply
:+5VEXT,+12VEXT,-12VEXT
galvanically separated
from the
internal supply: 5V
Function description
XYZ command:
The interpolator
generates from the specified linear distance XYZ on the robot head
by means of
inverse transformation nominal coordinates for 6 axes of an articulated arm
robot.
A folow XYZ path
can be done without interruption (NXYZ block)
Execution time of
the inverse transformation "XYZ to A1..A5": 0.5 uS
Axes A5, A6 lead tangential movement to driven XYZ route.
So
for e.g.
suitable for welding or gluing processes.
XY
command :
for testing and optimizing the individual axes:
Movements in the axes can be programmed from 3 axis levels
E0:A1,A2 / E1:A3,A4 / E2:A5,A6
directly into each level.
The
software can be adapted to any robot by the customer.
Robot parameters such as dimensions, axis resolutions, etc.
can
be entered via the USB input.
Interpolation
frequency on the XYZ route: max. 0.9 MHz
Variable ramp
length, max 4 sec.
The force sensor
inputs cause an adjustable correction of the
Axis
setpoints XYZ.
This
compensates for the deformation of the robot arms due to machining processes.
This also
enables e.g. Milling light metal.
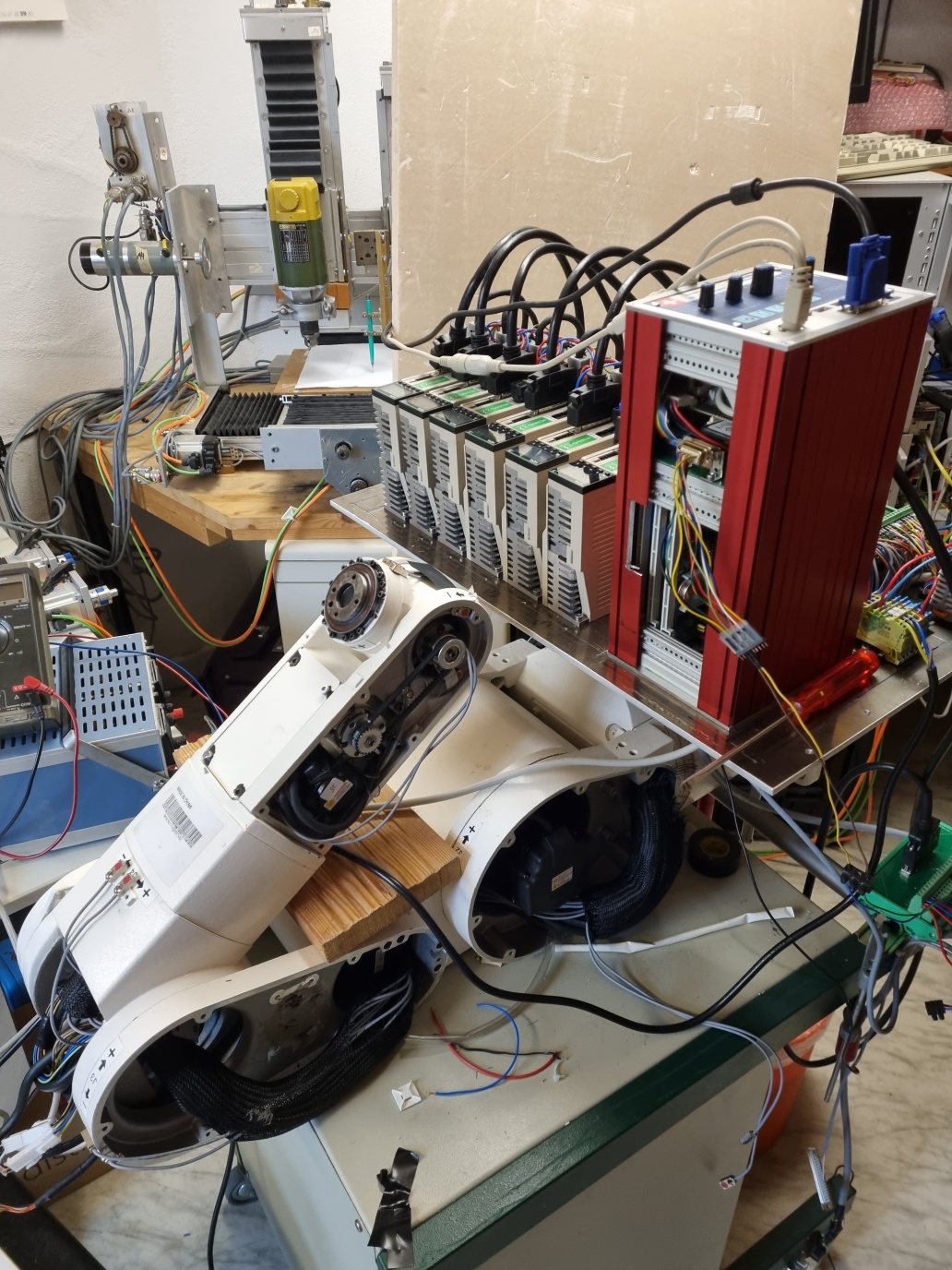
The
AS21 controller can be cascaded, i.e. each card can be operated in parallel
and independently control
a 6-axis robot,
synchronization via
interpolation frequency input.
This
also enables Corobot control
|